mirror of
https://codeberg.org/canoeboot/cbwww.git
synced 2024-11-22 02:14:43 +00:00
685 lines
41 KiB
Markdown
685 lines
41 KiB
Markdown
---
|
||
title: 通过 SPI 协议对 25XX NOR flash 进行读/写
|
||
x-toc-enable: true
|
||
...
|
||
|
||
本指南将教你怎样使用各种工具,通过 SPI 协议对 25xx NOR flash 进行外部再编程。这是 coreboot 所支持的计算机中,最常见的 flash IC 类型。目前 canoeboot 支持的每个系统,基本都使用这种类型的引导 flash;唯一的例外就是 ASUS KFSN4-DRE,它在 PLCC32 芯片座中使用了 LPC flash,你可以在供应商固件启动后,对其进行热切换,然后再内部刷入。十分简单!
|
||
|
||
我们会用到 [flashprog](https://flashprog.org/Flashrom) 软件,这个软件可以读出、擦除及重写这些 flash 芯片。
|
||
|
||
canoeboot 目前记录了这些 SPI 编程器的使用方法:
|
||
|
||
* Raspberry Pi Pico
|
||
* 树莓派(Raspberry Pi,RPi)
|
||
* BeagleBone Black(BBB)
|
||
* Libre Computer 'Le Potato'
|
||
|
||
其他的 SPI 编程器还有许多。本页面以后会记载更多的 SPI 编程器。或者你也可以自己弄明白;尽管你用的编程器还没有被 Canoeboot 记载,但这个页面某些部分的信息仍然会很有用。
|
||
|
||
大部分支持 canoeboot 机器,都需要在第一次刷写的时候,借助这里的教程或是类似教程,对其进行外部再刷写。不过,目前支持的所有机器,你都可以在 canoeboot 运行时,对其进行内部再刷写。
|
||
|
||
*内部*刷写是指,主机上的 CPU 可以使用板载 SPI 编程器(每个主板都有)对 SPI flash 进行再编程。这可以在 Linux 上使用 flashprog 做到。
|
||
|
||
你在读的*这个*教程,使用的是*外部*编程器。之所以叫*外部*,是因为用的不是主板上的*内部*编程器。
|
||
|
||
Raspberry Pi Pico
|
||
=================
|
||
|
||
|
||
|
||
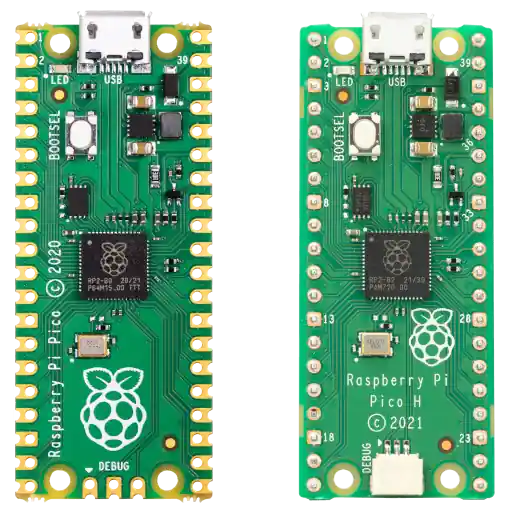
If you don't already have a programmer, get this one! It's well engineered,
|
||
safe, and costs just $5 with headers pre-soldered (Raspberry Pi Pico H).
|
||
Additionally, all the software running on it is free, down to the full
|
||
[Boot ROM](https://github.com/raspberrypi/pico-bootrom). The wireless
|
||
versions (Pico W & Pico WH) need vendor firmware to use the Wi-Fi chip,
|
||
but that is not needed for following this guide.
|
||
|
||
A Pico has proper 3.3V logic levels, unlike a ch341a. Which means it won't
|
||
destroy your board by sending 5V to it. If you have a 1.8V flash chip,
|
||
you need to add a logic level converter.
|
||
|
||
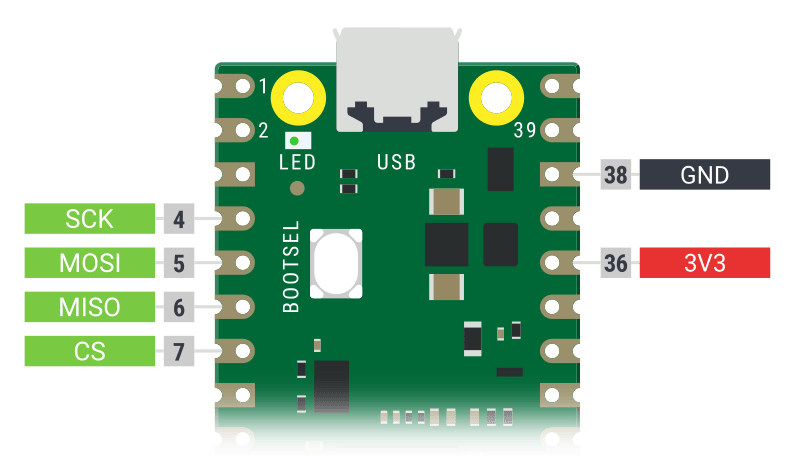
First, connect just the Pico to your computer with a micro-USB cable.
|
||
Mount it like any other USB flash drive. If it isn't detected, you might need
|
||
to press the BOOTSEL button while you plug it in (this forces it into the
|
||
bootloader mode).
|
||
|
||
Copy the relevant `.uf2` file into your Pico. To build this firmware, you
|
||
could build it yourself or you could also clone `cbmk.git` and [install build
|
||
dependencies](..//build/#first-install-build-dependencies), then inside cbmk,
|
||
do:
|
||
|
||
./mk -b pico-serprog
|
||
|
||
This will automatically build the rpi-pico firmware, and the file will be
|
||
at `bin/serprog_rp2040/serprog_pico.uf2`
|
||
and `bin/serprog_rp2040/serprog_pico_w.uf2`.
|
||
|
||
Disconnect the Pico and proceed to wire it to your
|
||
[flash chip](/docs/install/spi.html#identify-which-flash-type-you-have).
|
||
|
||
|
||
|
||

|
||
|
||
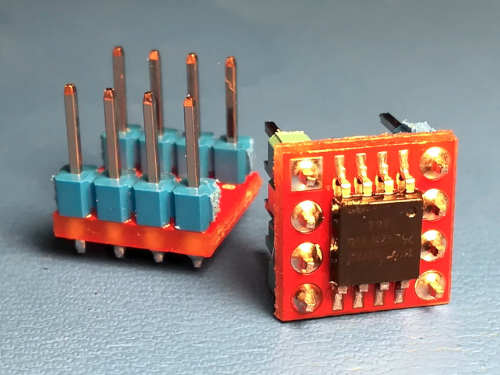
Headers were manually soldered on the top side, and the plastic packaging
|
||
was repurposed as an insulating base. These might be nice to have, but by no
|
||
means necessary. If your headers are on the other side, just keep in mind
|
||
that the pinouts are as seen from above.
|
||
|
||
Now run (as root) `dmesg -wH`. When you plug in the Pico, a line like this
|
||
will appear:
|
||
|
||
[453876.669019] cdc_acm 2-1.2:1.0: ttyACMx: USB ACM device
|
||
|
||
Take note of the ttyACMx. Flashrom is now usable
|
||
(substitute ttyACMx with what you observed earlier).
|
||
|
||
flashprog -p serprog:dev=/dev/ttyACMx,spispeed=16M
|
||
|
||
spispeed=32M usually works, but since it's not much faster it's probably
|
||
not worth it. The 12Mbps USB port is limiting the actual speed here.
|
||
|
||
不要使用 CH341A!
|
||
==================
|
||
|
||
canoeboot 支持的机器,NOR flash 使用的是 3.3V DC 或 1.8V DC,这也包括了数据线路。CH341A 在数据线路上有 5V 逻辑电平,这会损伤 SPI flash 和它连接的南桥,以及它连接的其它任何东西。
|
||
|
||
可惜的是,ch341a 编程器非常流行。除非你修复了这个问题,不然千万不要用它。你确实是可以修复它,让数据线路在 3.3v 工作的,只要跟着这里的步骤走:
|
||
|
||
<https://www.eevblog.com/forum/repair/ch341a-serial-memory-programmer-power-supply-fix/>
|
||
|
||
现实是,大多数人都不会去修复自己的 ch341a,而是选择去冒这个险,所以本网站不会提供 ch341a 的指南。最好不要使用那个设备。
|
||
|
||
**那篇 eevblog 没谈论到的一点是:WP/HOLD 引脚(第 3 和第 7 引脚)必须通过上拉电阻保持到高电平,但在 CH341A 上,它们是直接连接到 3.3V DC 的(连接在第 8 引脚上)。建议切断与 WP 和 HOLD 引脚的连接,并使用上拉电阻连接两引脚。1k 到 10k(欧姆)的值应该都可以。**
|
||
|
||
**如果电流出现浪涌,比如你把夹子连错了导致两个引脚短路的时候,那 WP/HOLD 缺少上拉电阻就会导致 VCC 与接地端之间短路,这会产生大量积热,可能还会起火(电路损坏更是当然的了)。在 SOIC8 上,第 3 引脚是 WP,第 4 引脚是 GND,所以说直接把 3.3v 连过去十分冒险;这些都是你用上拉电阻的理由。**
|
||
|
||
(比如你用 pomona 的夹子的话)你想刷的所有主板,多半已经存在用于 WP/HOLD 的上拉电阻了,所以直接断开 CH341A 上的 WP/HOLD 也行。只有在你也想刷写 ZIP 芯片座中的芯片时,你在这个 CH341A 上放置(在这个修改版中)的上拉电阻才有用。如果比方说笔记本主板和 CH341A 都存在上拉电阻,那就意味着(各支路上的)两个并联电阻会成为等效的串联电阻。假如我们有一台笔记本,它可能有约 3.3k 大小的上拉电阻,那在 CH341A 这边加上约 5.6k 欧姆的阻值就是合理的。
|
||
|
||
或者,你也可以这样解决问题:用一个有逻辑电平转换器的适配器,并确保有匹配的 vcc 进入 flash。在这种方案下,使用逻辑电平转换器相当灵活,你可以用它设置许多电压,比如说 1.8v 或者 3.3v。
|
||
|
||
再重复一遍:
|
||
|
||
**不要买 ch341a!** 它设计出来,不适合把 ROM 刷到那些使用了 3.3v SPI 的机器(即大多数 coreboot 机器)。千万不要使用它!现在厂商还没有修复这个问题,而且估计他们也不会再修复了!
|
||
|
||
如果你看到有人在谈论 CH341A,请给他们看这个页面,告诉他们为什么 CH341A 不好。
|
||
|
||
以下是完成了这两个修改(3.3v 逻辑电平和 WP/HOLD 上拉电阻)的黑色 CH341A:\
|
||
<img tabindex=1 src="https://av.canoeboot.org/ch341a/0000_th.jpg" /><span class="f"><img src="https://av.canoeboot.org/ch341a/0000.jpg" /></span>
|
||
<img tabindex=1 src="https://av.canoeboot.org/ch341a/0001_th.jpg" /><span class="f"><img src="https://av.canoeboot.org/ch341a/0001.jpg" /></span>
|
||
|
||
绿色版本(上面未展示)可能已经连接了 3.3v 逻辑电平,但仍然需要为 WP/HOLD 增加上拉电阻。
|
||
|
||
识别你的 flash 类型
|
||
==================================
|
||
|
||
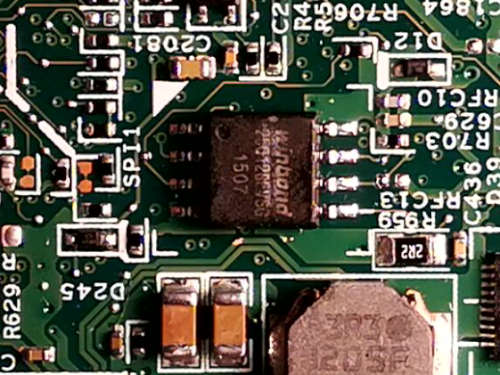
每一个 flash,都会有一个点或者标记,表明这是第 1 引脚(如 WSON8 的第 1 焊盘)。
|
||
|
||
参考下面的图片,再看看你的主板。搞清楚你的芯片类型之后,根据你了解的情况及本教程剩下的部分,来实现你的目标,即对你的引导 flash 进行读/写。
|
||
|
||
SOIC8
|
||
-----
|
||
|
||
|
||
|
||
SOIC16
|
||
------
|
||
|
||

|
||
|
||
SOIC8 和 SOIC16 是最常见的类型,但也有其他的类型:
|
||
|
||
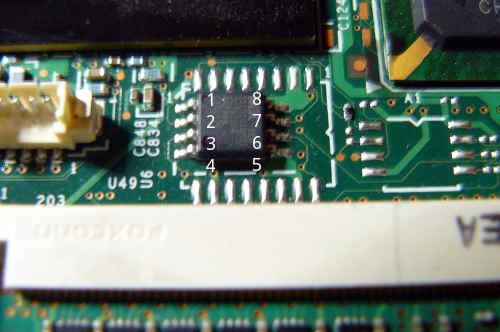
WSON8
|
||
-----
|
||
|
||
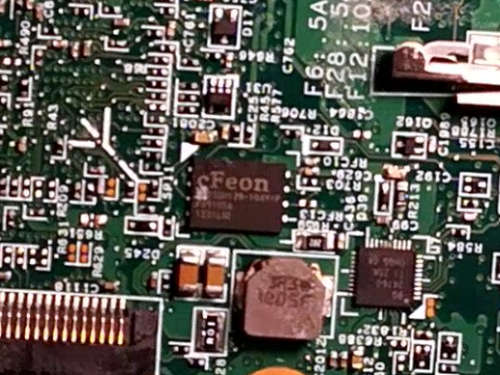
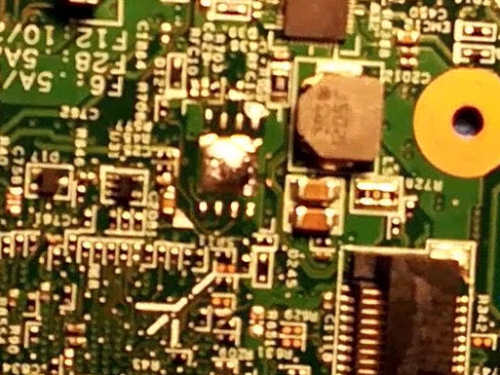
X200S 或 X200 Tablet 上是像这样的:\
|
||

|
||
|
||
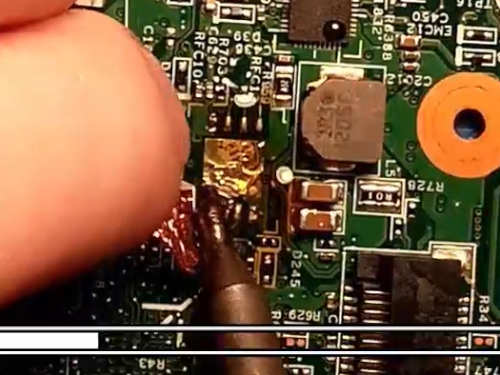
T400S 上,是在 RAM 附近的这个位置:\
|
||
\
|
||
注意: 本照片中的芯片换成了 SOIC8
|
||
|
||
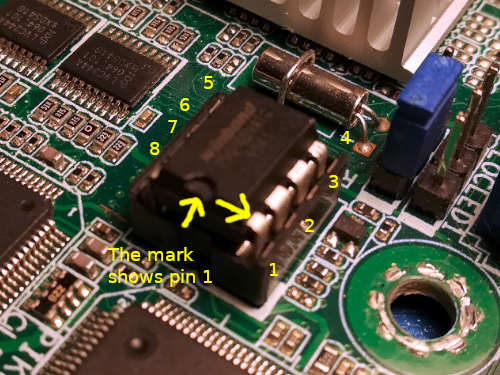
DIP8
|
||
----
|
||
|
||
|
||
|
||
电源电压
|
||
--------------
|
||
|
||
之前,Canoeboot 支持的所有主板,刚好都有在 3.3V DC 下工作的 SPI NOR 芯片。因为最近添加了额定 1.8V DC 芯片的 Chromebook,所以就不再是这么回事了。
|
||
|
||
检查主板上芯片的元件型号,再查找一下它的数据表。找出它需要的电源电压并记下来。如果它和你外部刷写硬件的输出电压不匹配,那你只能通过适配器或者逻辑电平转换器,把它连至芯片,而绝不能直接连接。
|
||
|
||
软件配置
|
||
======================
|
||
|
||
通用/Le potato
|
||
-----------------
|
||
|
||
[通用指南](spi_generic.md)可以帮助你使用本指南未列出的 SBC(单板电脑)。不过,那份指南会使用 libre computer 'Le Potato' 作为参考板。如果你有那块板子,你应该参考 [通用指南](spi_generic.md)。
|
||
|
||
BeagleBone Black(BBB)
|
||
----------------------
|
||
|
||
SSH 连接到你的 BeagleBone Black。假定你在 BBB 上用的是 Debian 9。你将在 BBB 上运行 `flashprog`。
|
||
|
||
注意:该部分已过时,因为它是写给 BBB 上运行的 Debian 9 的。
|
||
|
||
以 root 运行以下命令,开启 spidev:
|
||
|
||
```
|
||
config-pin P9.17 spi_cs
|
||
config-pin P9.18 spi
|
||
config-pin P9.21 spi
|
||
config-pin P9.22 spi_sclk
|
||
```
|
||
|
||
检查 spidev 设备现在是否存在:
|
||
|
||
ls /dev/spidev*
|
||
|
||
输出:
|
||
|
||
/dev/spidev1.0 /dev/spidev1.1 /dev/spidev2.0 /dev/spidev2.1
|
||
|
||
现在 BBB 可以开始刷了。以下的 systemd 服务文件可以选择性开启,从而让它重启后依然存在。
|
||
|
||
```
|
||
[Unit]
|
||
Description=Enable SPI function on pins
|
||
|
||
[Service]
|
||
Type=oneshot
|
||
ExecStart=config-pin P9.17 spi_cs
|
||
ExecStart=config-pin P9.18 spi
|
||
ExecStart=config-pin P9.21 spi
|
||
ExecStart=config-pin P9.22 spi_sclk
|
||
RemainAfterExit=yes
|
||
|
||
[Install]
|
||
WantedBy=multi-user.target
|
||
```
|
||
|
||
现在测试 flashprog:
|
||
|
||
./flashprog -p linux_spi:dev=/dev/spidev1.0,spispeed=512
|
||
|
||
重要的一点是,要使用 `spispeed=512` 或者更低的速度,例如 256 或 128,否则 BBB 会十分不稳定。
|
||
|
||
输出示例:
|
||
|
||
```
|
||
Calibrating delay loop... OK.
|
||
No EEPROM/flash device found.
|
||
Note: flashprog can never write if the flash chip isn't found automatically.
|
||
```
|
||
|
||
这表示正常工作了(夹子没连接任何 flash 芯片,所以出错是正常的)。
|
||
|
||
BBB 注意事项
|
||
-----------------
|
||
|
||
不建议使用 BeagleBone Black,因为拿它来进行 SPI 刷写,速度很慢而且不稳定,并且现在有更好的选择了。我们以前建议使用 BBB,因为它可以完全运行自由软件,但现在有了更佳的选择。
|
||
|
||
计划:讲解其他 SPI 刷写工具
|
||
|
||
Rasberry Pi(RPi)
|
||
-----------------
|
||
|
||
SSH 连接到树莓派。你将在树莓派上运行 `flashprog`。
|
||
|
||
你必须在树莓派上配置 `spidev`。这是 Linux 内核的一个特别驱动;它严谨的名字叫做 `spi-bcm2835`。
|
||
|
||
这个页面有信息:\
|
||
<https://www.raspberrypi.org/documentation/hardware/raspberrypi/spi/README.md>
|
||
|
||
假定你的树莓派运行的是最新的 Raspbian。运行:
|
||
|
||
sudo raspi-config
|
||
|
||
在 Interface 部分,你可以开启 SPI。
|
||
|
||
用于 SPI 通讯的设备位于 `/dev/spidev0.0`。
|
||
|
||
RPi 驱动强度(Drive Strength)
|
||
------------------
|
||
|
||
RPi 的 flashprog 可能无法检测到一些系统的 SPI flash,即使你已经完美地连好了线并夹住了芯片。这可能是因为树莓派 GPIO 的驱动强度,它默认是 8mA。驱动强度本质上就是,在保持高电平最低电压的同时,引脚最高能输出的电流。对树莓派而言,这个电压是 3.0 V。
|
||
|
||
类似地,也要满足一个最低电压,SPI flash 芯片才会把它当成高逻辑电平。这个值一般是 SPI flash 的 0.7*VCC,对 3.3V 的芯片而言也就是 2.31V。如果驱动强度太低了,那 flash 芯片的引脚处的电压可能会低于最低电压,导致它被视为发送了低逻辑电平,而不是高逻辑电平。
|
||
|
||
在许多系统,SPI flash 的 VCC 引脚和机器中其他芯片是共享的,导致你的编程夹提供的电压会给这些芯片供电。这样的话,芯片组的一部分就会启动,并试图把 SPI 线路弄得忽高忽低,妨碍了树莓派要发送的数据。如果树莓派和芯片组要把一个引脚设置为不同的值,驱动强度更高的一边能够将电压“拉”到它想设置的电平。
|
||
|
||
幸运的是,树莓派的驱动强度能增加到 16mA。有许多工具可以设置这一项,例如 pigpio 项目的 pigs 工具。在 Raspberry Pi OS 里,可以使用以下命令安装 pigpio 并将驱动强度设置为 16mA:
|
||
|
||
安装 pigpio:
|
||
|
||
sudo apt install pigpio
|
||
|
||
启动 pigpiod 守护进程,pigs 工具会与其通讯,从而与 gpio 交互:
|
||
|
||
sudo pigpiod
|
||
|
||
将包含了 spi0 引脚的 GPIO 0 组,驱动强度设置为 16mA:
|
||
|
||
pigs pads 0 16
|
||
|
||
注意,硬件工作的驱动强度是 2mA 的倍数,pigs 会将奇数值四舍五入到下一个 2 的倍数。你可以使用以下命令查看驱动强度
|
||
|
||
pigs padg 0
|
||
|
||
警告:如果芯片组非常想把引脚的值设置为和树莓派相反,那树莓派的 GPIO 引脚就会通过比 16mA 还高的电流,这样会损坏引脚,因为它设计只能耐受 16mA。驱动强度不是电流限制。尽管如此,不管驱动强度如何,这对树莓派都有风险。芯片组和 flash 之间的电阻应该会对此进行保护,但并非所有主板都有这些电阻。
|
||
|
||
见 <https://www.raspberrypi.com/documentation/computers/raspberry-pi.html#gpio-pads-control> 了解树莓派上的驱动强度控制。
|
||
|
||
RPi 注意事项
|
||
-----------------
|
||
|
||
基本上,Raspbian 项目,即现在的 Raspberry Pi OS,对其仓库进行了更新,增加了一个新的“受信任”仓库,这刚好是一个微软软件仓库。他们这么做,似乎是为了 VS Code,但问题在于,这可以让微软自由地控制他们喜欢的依赖(根据 apt-get 规则)。每当你更新,你都会对微软的服务器发送请求。不觉得这很奇怪吗?
|
||
|
||
微软不应该对你的 Linux 系统有*任何*访问权!这是 Raspbian 添加在他们仓库的 commit,正是它故意添加了我们应该称之为安全漏洞的仓库:
|
||
|
||
* <https://github.com/RPi-Distro/raspberrypi-sys-mods/commit/655cad5aee6457b94fc2336b1ff3c1104ccb4351>
|
||
|
||
在受到公众的强烈反对后,他们在以下 commit 中移除了它:
|
||
|
||
* <https://github.com/RPi-Distro/raspberrypi-sys-mods/commit/ed96790e6de281bc393b575c38aa8071ce39b555>
|
||
* <https://github.com/RPi-Distro/raspberrypi-sys-mods/commit/4d1afece91008f3787495b520ac03b53fef754c6>
|
||
|
||
RPi 的自由固件
|
||
---------------------
|
||
|
||
旧款树莓派的引导固件可以替换成完全自由的固件。对有些用户而言,这额外的一步可能很有用。参见:
|
||
|
||
<https://github.com/librerpi/>
|
||
|
||
网站:
|
||
|
||
<https://librerpi.github.io/>
|
||
|
||
安装 flashprog
|
||
----------------
|
||
|
||
如果你在使用 BBB 或者 RPi,你需要在 SSH 进去之后再这么做。
|
||
|
||
Flashrom 是用来读出、擦除、重写 NOR flash 内容的软件。
|
||
|
||
使用 Git 仓库中的 canoeboot 构建系统,你可以下载并安装 flashprog。首先下载 [cbmk Git 仓库](https://codeberg.org/canoeboot/cbmk),然后执行:
|
||
|
||
cd cbmk
|
||
sudo ./mk dependencies ubuntu2004
|
||
|
||
注意:你可以输入 debian、arch 或 void 来替换 ubuntu。debian 脚本也可以用于新版 ubuntu。
|
||
|
||
./mk -b flashprog
|
||
|
||
如果 `ubuntu2004` 报告了依赖缺失,编辑一下这个脚本,把缺失的依赖移除就行了。脚本位于 `config/dependencies/ubuntu2004`,它是写给 Ubuntu 20.04 的,但在其他使用 `apt-get` 包管理器的 Linux 发行版应该也能用。
|
||
|
||
接下来,会出现一个 `flashprog/` 目录,其中有一个 `flashprog` 可执行文件。如果你在运行上面的依赖命令的时候,出现了缺失包的错误,则修改 `config/dependencies/ubuntu2004`。那个脚本会在 apt-get 中下载并安装构建依赖,它是为运行 Ubuntu 的 x86-64 系统写的,但在树莓派上的 Raspbian 应该能用。
|
||
|
||
或者,你可以直接从上游下载 flashprog,位于:<https://flashprog.org/Flashrom>
|
||
|
||
如果你是在 ThinkPad X200 上刷写 Macronix flash 芯片,则要使用一个 flashprog 的特别修改版,下载地址在这里:<https://vimuser.org/hackrom.tar.xz> —— 其中有修改版的源代码,也有可以直接运行的二进制文件。将 `--workaround-mx` 参数传给 flashprog。这会缓解稳定性问题。
|
||
|
||
如果你直接下载了 flashprog 源代码,你可以进入目录并直接运行 `make`。在 canoeboot 构建系统中,`config/dependencies/` 处的脚本写明了构建依赖,你可以直接使用 `apt-get` 软件安装。
|
||
|
||
如何使用 flashprog
|
||
===================
|
||
|
||
请先阅读本页更下方的部分,了解特定的芯片类型及其接线方法。
|
||
|
||
读出
|
||
-------
|
||
|
||
刷入新的 ROM 镜像之前,强烈建议你将当前芯片的内容读出到一个文件。
|
||
|
||
树莓派正确接线后,运行这个命令来查看是否检测到 25xx flash:
|
||
|
||
sudo ./flashprog -p linux_spi:dev=/dev/spidev0.0,spispeed=32768
|
||
|
||
对 BBB 而言,必须使用更慢的速度及不同的设备路径:
|
||
|
||
sudo ./flashprog -p linux_spi:dev=/dev/spidev1.0,spispeed=512
|
||
|
||
在 BBB 上,绝对不要使用高于 `spispeed=512` 的速度。有时候,你可能还要低到 `spispeed=128` 的速度。BBB 对 SPI 刷写而言非常不稳定、不可靠。在读取的时候,要多次读出,并检查它们的 checksum 是否一致,然后再刷。你可能需要多次刷写芯片!
|
||
|
||
注意:在有些机器上,更高的速度会不稳定。这时,尝试一下更低的速度,例如 `spispeed=4096` 或者 `spispeed=2048`,这大多数情况下应该会工作,但明显会慢些。如果你使用的线短于 10cm,设置成 `spispeed=32768` 一般刚好就能工作了。
|
||
|
||
如果检测到了 flash 芯片,你可以现在尝试读出这个 flash 的内容,或者给它刷写新的 ROM。
|
||
|
||
在 RPi 上,这样读出:
|
||
|
||
sudo ./flashprog -p linux_spi:dev=/dev/spidev0.0,spispeed=32768 -r dump.bin
|
||
|
||
BBB 的话,这样:
|
||
|
||
sudo ./flashprog -p linux_spi:dev=/dev/spidev1.0,spispeed=512 -r dump.bin
|
||
|
||
建议读出*两次*,比如弄一个 `dump2.bin`,然后检查 sha1sum:
|
||
|
||
sha1sum dump*.bin
|
||
|
||
如果 checksum 匹配了,那读得就没问题。如果不匹配,那就要检查接线了。为了最佳稳定性,线长应该要短于 10cm,并且长度都要相同(VCC 和 GND 线路可以长些)。
|
||
|
||
这条建议是*特别*给 BBB 的,这块板子十分不可靠。
|
||
|
||
有些主板有不止一个 flash 芯片,你需要从两块芯片中读取,并把它们合并成一个文件。大多数时候。两个芯片的配置包含了一块 8mb 的“下层”芯片和一块 4mb 的“上层”芯片。刚刚描述的配置适用于 x230、t430 和 t440p 的情况。对其他主板而言,请确认那块芯片包含了 rom 的下层部分和上层部分。要把两个 flash 组合起来的话,你可以用比如说 `cat`:
|
||
|
||
cat bottom_8mb.rom top_4mb.rom > full_12mb.rom
|
||
|
||
注意,如果你要手动提取 blob,那你就需要这个组合而成的 rom。
|
||
|
||
写入
|
||
-------
|
||
|
||
接下来,运行这个命令(RPi):
|
||
|
||
sudo ./flashprog -p linux_spi:dev=/dev/spidev0.0,spispeed=32768 -w /path/to/canoeboot.rom
|
||
|
||
如果用的是 BBB:
|
||
|
||
sudo ./flashprog -p linux_spi:dev=/dev/spidev1.0,spispeed=512 -w /path/to/canoeboot.rom
|
||
|
||
用 BBB 的时候,可能得使用低于 512 的速度。你也许还得多次重复刷写,才能完全工作。
|
||
|
||
再说一遍,为了稳定性,你可能需要使用更低的 `spispeed` 值。
|
||
|
||
当命令输出了以下内容,那就说明刷写成功了。如果没有,那就再刷一遍。
|
||
|
||
```
|
||
Reading old flash chip contents... done.
|
||
Erasing and writing flash chip... Erase/write done.
|
||
Verifying flash... VERIFIED.
|
||
```
|
||
|
||
如果它显示“VERIFIED”了,或者芯片的内容和请求的镜像一致,那芯片就刷写成功了。
|
||
|
||
硬件配置
|
||
======================
|
||
|
||
软件配置请参考上面的教程。下面的建议会教你如何为每种 flash 芯片接线。
|
||
|
||
警告
|
||
--------
|
||
|
||
在芯片还没有正确接好线时,先不要连接电源。例如,不要连接到接通电源的测试夹。
|
||
|
||
请先断开或关闭电源,再*断开*刷写工具与芯片的连接。
|
||
|
||
注意你提供给芯片的电源电压是否真的合适。目前 canoeboot 支持的硬件,大多数的 SPI flash 都是在 3.3V DC 下工作的,逻辑电平也一样。有一部分(至少是 Chromebook)的芯片可能在 1.8V DC 下工作。你需要确认 SPI flash 芯片的元件型号及数据集,看看它需要的电源电压。如果你的外部刷写硬件无法匹配,那就使用适配器或者逻辑电平转换器来刷写。
|
||
|
||
对这些芯片做任何操作时,要检查一遍你使用的电源电压是否正确,这一点很重要。低于额定的电源电压不会造成任何损伤,但高于它的话就会把芯片烧了(大多数 3.3V 的芯片,能接受的电压介于 2.7V 和 3.6V 之间,但 3.3V 是最理想的)。
|
||
|
||
也不要给你的 flash 芯片连接超过 1 个 DC 电源!那样混合电压的话,很容易损伤你的设备及芯片/主板。
|
||
|
||
MISO/MOSI/CS/CLK 接线
|
||
----------------------
|
||
|
||
在刷写这些芯片的时候,你可能也想增加 47 欧姆的串联电阻(不是加在 VCC 或 GND 线上)。这可以提供一些过流保护。在 Intel 平台上,SPI flash 直接连接到南桥芯片组时,通常会通过这样的电阻。
|
||
|
||
ISP 编程及 VCC 二极管
|
||
-----------------------------
|
||
|
||
ISP 即系统内编程(in-system programming)。它指的是,一块芯片已经装在了你想安装 canoeboot 的电脑的主板上,而你要对这块芯片进行刷写。
|
||
|
||
为了通过二极管来驱动(VCC 引脚上的)SPI flash,而对主板进行修改,可能会有一定的好处,但要注意的是:二极管会导致电压下降。一块需要 3.3V VCC 的芯片,能够接受大约 2.7V 到 3.6V DC,但压降后可能会低于这个区间。如果你要这么做的话,还请确认 WP 和 HOLD 引脚仍然保持在高电平状态;每一个引脚都通过自己的电阻(1K 到 10K 欧姆)连接到了*相同*的通过二极管的电源。
|
||
|
||
原因很简单:大多机器的 flash 都和主板上其他部件共用同一路电源,这会分走很多电流。然后,如果你不小心提供了过高的电压或者导致了过流,那可能就会烧了其他部分;但如果有二极管保护,你只能把引导 flash 烧了(如果你焊接技术不错的话,那很容易替换)。
|
||
|
||
把二极管接上去的时候,要确认芯片上的 VCC 隔离了主板上的其他所有部件,后者会共用同一路电源。然后,确保 WP/HOLD 的上拉电阻*仅*连接到了二极管导通 VCC 引脚的那一边(这一点很重要,因为如果不这样做的话,ISP 刷写的时候 WP/HOLD 就不会保持高电平,即使主板完全开机时它们还能保持高电平)。
|
||
|
||
还有就是:安装好二极管后,确保 SPI flash 完全启动时在合适的电源电压下工作(3.6V 芯片而言是 2.7V 到 3.3V)。
|
||
|
||
如果目标主板是桌面、工作站、服务器主板(而不是笔记本),那如果主板用的是 SOIC8/WSON8,你就可以对它拆焊,(对 SOIC8、WSON8 或 DIP8 之中的任意一个)使用芯片测试座来替换,因为那样你就可以简单地把 flash 插入面包板刷写了。
|
||
|
||
计划:在 canoeboot.org 创建一个页面,讲怎么在 canoeboot 支持的所有主板这么做。
|
||
|
||
BeagleBone Black(BBB)上的 GPIO 引脚
|
||
-----------------------------------
|
||
|
||
把 pomona 夹子连接到 BBB 时,参考这张图片:<https://beagleboard.org/Support/bone101#headers> (D0 = MISO 或连接到 MISO)。
|
||
|
||
如果你要用 *P9 排针*来连接芯片刷写的话,请看那个页面的那个部分。
|
||
|
||
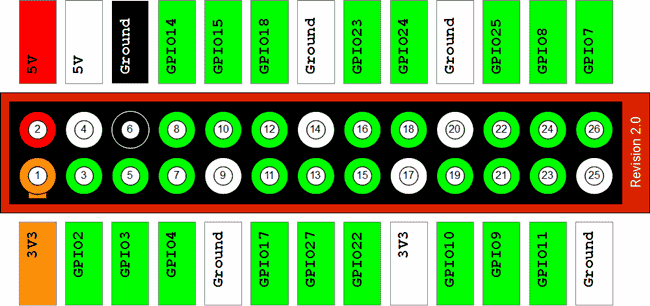
40 引脚树莓派(RPi)的 GPIO 引脚
|
||
--------------------------------------
|
||
|
||
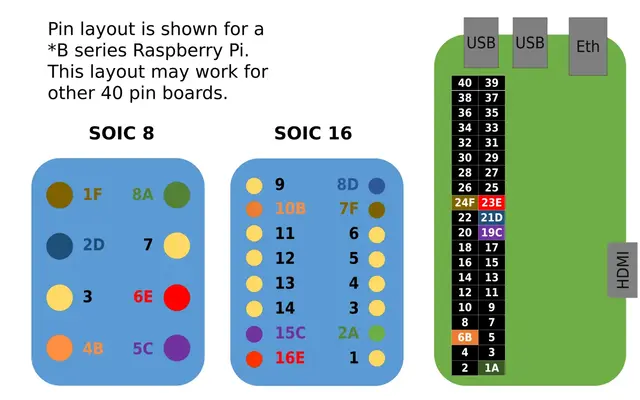
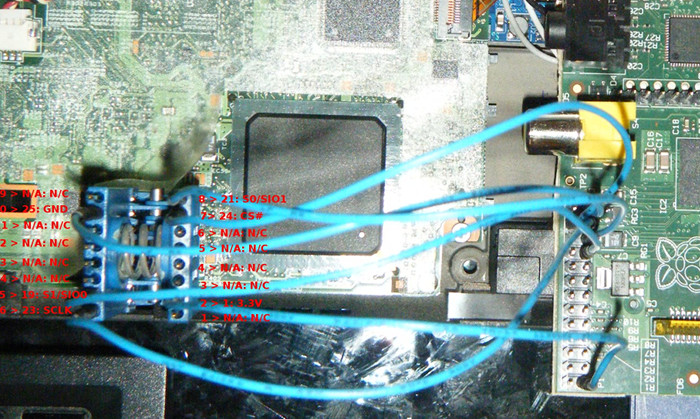
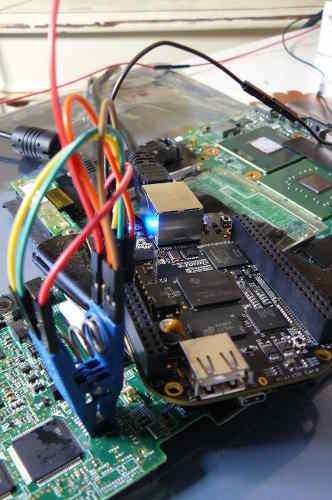
下图展示了大多数现代树莓派及其衍生版的引脚分配。图中右边是 RPi 的引脚,左边是两个 SOIC 夹。
|
||
|
||
|
||
|
||
26 引脚树莓派(RPi)的 GPIO 引脚
|
||
-------------------------------
|
||
|
||
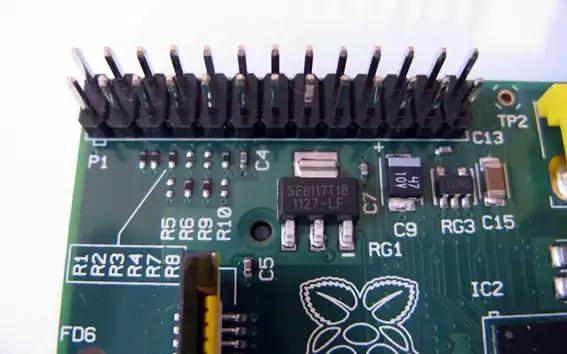
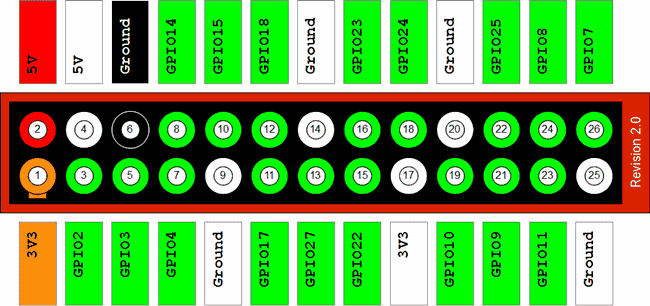
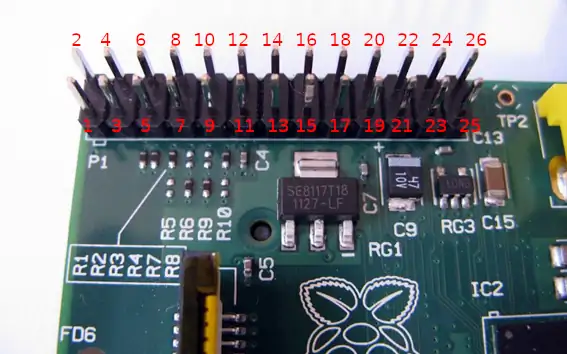
树莓派 B 款 26 GPIO 引脚图(对 40 引脚的 B+ 款而言,从右边开始数,剩下 14 个引脚):
|
||
|
||
|
||
|
||
此处的信息,也请在阅读以下其他部分时参考:
|
||
|
||
SOIC8/DIP8/WSON8 接线图
|
||
-------------------------------
|
||
|
||
参考此表:
|
||
|
||
Pin \# 25xx signal RPi(GPIO) BBB(P9 header)
|
||
------ ----------- ---------- --------------
|
||
1 CS 24 17
|
||
2 MISO 21 21
|
||
3 *未使用* *未使用* *未使用*
|
||
4 GND 25 1
|
||
5 MOSI 19 18
|
||
6 CLK 23 22
|
||
7 *未使用* *未使用* *未使用*
|
||
8 VCC 1 3
|
||
|
||
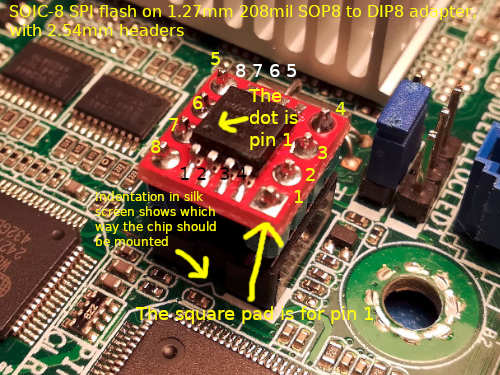
在你的 SOIC8 上,其中一个角落会有一个点,这个点是第 1 引脚。
|
||
|
||
注意:第 3 和第 7 引脚是 WP/HOLD 引脚。在面包板上刷写芯片时,请对它们使用上拉电阻(见上面的注记),并在第 8 引脚(VCC)使用去耦电容。
|
||
|
||
注意:在 X60/T60 thinkpad 上,不要连接第 8 引脚。而是将你的 PSU 接在主板供电口上,但不要启动主板。这会提供稳定的 3.3V 电压及足够的电流。在这些笔记本上,这是必要的,因为 flash 和其他许多 IC 共用一路 3.3V DC 电源,这些 IC 都会分走很多电流。
|
||
|
||
SOIC16 接线图(树莓派)
|
||
------------------------------------
|
||
|
||
RPi GPIO 排针:\
|
||
|
||
|
||
|
||
BBB P9 排针:\
|
||
<https://beagleboard.org/static/images/cape-headers.png>
|
||
|
||
参考此表:
|
||
|
||
Pin \# 25xx signal RPi(GPIO) BBB(P9 header)
|
||
-------- -------------- ----------- --------------
|
||
1 *未使用* *未使用* *未使用*
|
||
2 VCC 1 3
|
||
3 *未使用* *未使用* *未使用*
|
||
4 *未使用* *未使用* *未使用*
|
||
5 *未使用* *未使用* *未使用*
|
||
6 *未使用* *未使用* *未使用*
|
||
7 CS\# 24 17
|
||
8 MISO 21 21
|
||
9 *未使用* *未使用* *未使用*
|
||
10 GND 25 1
|
||
11 *未使用* *未使用* *未使用*
|
||
12 *未使用* *未使用* *未使用*
|
||
13 *未使用* *未使用* *未使用*
|
||
14 *未使用* *未使用* *未使用*
|
||
15 MOSI 19 18
|
||
16 SCLK 23 22
|
||
|
||
参考本页面上方的 RPi GPIO 指南。
|
||
|
||
在你的 SOIC16 上,其中一个角落会有一个点,这个点是第 1 引脚。
|
||
|
||
注意:第 1 和第 9 引脚是 WP/HOLD 引脚。在面包板上刷写芯片时,请对它们使用上拉电阻(见上面的注记),并在第 2 引脚(VCC)使用去耦电容。
|
||
|
||
上拉电阻和去耦电容
|
||
-------------------------------------------
|
||
|
||
**如果芯片是装在面包板上的,那请遵循这里的步骤。如果你要刷写的芯片已经焊接在了主板上,那请忽略这一部分。**
|
||
|
||
如果你要刷写的新芯片还没有安装在主板上,那这一部分才有关系。你需要在 WP 和 HOLD 引脚增加上拉电阻,在 VCC 引脚增加去耦电容。如果芯片已经安装在了主板上,无论是通过焊接还是芯片座,那这些电容和电阻可能已经存在于主板上了,你可以直接刷写而无需将 WP/HOLD 拉高,也无需电容(只要连接外部电源即可)。
|
||
|
||
最佳方法如下:
|
||
|
||
* 如果是 DIP8 的话,将 DIP8 IC 插入面包板(2.54mm 的洞)
|
||
* 如果是 WSON8 的话,将 WSON8 插入 WSON8 socket,并装上面包板
|
||
* 如果是 SOIC8 的话,将 SOIC8 插入 SOIC8 socket,并装上面包板
|
||
* 使用 2.54mm 杜邦端子,将 SPI 刷写器连接到面包板,并正确接线(见下面的 SPI 刷写教程链接)
|
||
|
||
SOIC8/WSON8/DIP8:第 3 和第 7 引脚必须保持高逻辑电平状态,即每个引脚都通过上拉电阻连接到了 VCC(来自引脚 8 连接的电压层);1K 欧到 10K 欧都可以。当你刷写的芯片已经处于笔记本/桌面/服务器主板上时,那第 3 和第 7 引脚很可能已经处于高电平,所以就不用再管这一点了。
|
||
|
||
SOIC8/WSON8/DIP8:如果芯片在主板上,那第 8 引脚,即 VCC,就已经有去耦电容在上面了。但如果单独把芯片拿出来刷,那这些电容就不存在。电容会通过 AC,但阻挡 DC。由于电磁感应及 IC 状态高速切换导致的射频噪声,DC 电压那根线(从示波器上看)其实并不是直线,而实际上还混进了一些低压 AC;在高荷载下的一根噪声特别大的线上,约 300mV 及以上的噪声是常见的。为了消除那些噪声,需要将 DC 线的电容接地,并将 VCC 那边的电容尽可能接近 IC 的 VCC 引脚。我们建议在这里使用陶瓷电容器。建议使用的电容器为:100nF 和 4.7uF 的陶瓷电容器。电解电容器还不如此,因为它的 ESR(等效串联电阻)更加高(陶瓷电容器的 ESR 非常低,十分利于去耦)。
|
||
|
||
使用去耦电容的结果就是,DC 线上的部分噪声过滤到了大地,使得 DC 信号(从示波器上看)更加干净、笔直了。
|
||
|
||
SOIC16:同上,但在面包板上使用 SOIC16 socket。在 SOIC16 上,WP/HOLD 不同于上面的第 3/7 引脚,而是第 1 和第 9 引脚,所以要把上拉电阻接到那里。SOIC16 上的 VCC 是第 2 引脚,所以要把去耦电容接到那里。
|
||
|
||
SOIC8/WSON8/DIP8/SOIC16 未安装在主板上
|
||
--------------------------------------------------
|
||
|
||
如果你的机器的 SPI flash 容量较低,那你可以升级。在*大多数*机器上,SPI flash 是经过映射的内存,而(实际上)你最大可以使用 16MiB 的芯片。例如,canoeboot 的 KGPE-D16 和 KCMA-D8 主板默认有 2MiB flash,但你可以对它们轻松升级。另一个例子是 ThinkPad X200S、X200 Tablet 和 T400S,它们都有 WSON8,而最佳的方案就是将它替换为 SOIC8 flash 芯片。
|
||
|
||
在所有这些情况中,刷写新芯片都需要使用面包板,而不是测试夹。你需要使用 2.54mm 杜邦端子连接到树莓派。对数据线路而言,要确保每根线的长度都相等,线长约 10cm(不要再长了)。
|
||
|
||
一些建议:
|
||
|
||
* DIP8:建议选择 Winbond W25Q128FVIQ。这是个直接的替代品。
|
||
* SOIC8 也是可能的:建议选择 Winbond W25Q128FVSIG。
|
||
* DIP8 也可以使用转接器及 SOIC8。使用 208-mil 1.27mm SOP8/SOIC8 转 DIP8 的适配 PCB,并在每一边使用 2.54mm 四引脚排针(方形引脚),然后你就能把它当成正常的 P-DIP8 IC 插入了。这个页面是一个很好的例子: <https://coolcomponents.co.uk/products/soic-to-dip-adapter-8-pin>
|
||
* 如果你走上面的途径的话,那我们建议使用上述的 SOP8/DIP8 转接器。它是 Sparkfun 制造的,并且到处可见。没必要专门从一个网站上买。它的元件型号是:BOB-13655。
|
||
* 如果你使用 SOP/DIP 转接器和 SOIC8 IC,那你显然需要对它进行焊接。焊接这类 IC 时建议使用 K 焊头。使用良好的助焊剂和 60/40 含铅焊锡(或者 63/37),不要使用 Rohs 的无铅蹩脚货。
|
||
|
||
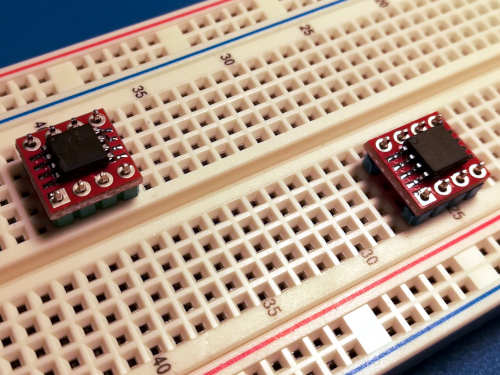
如果你使用 SOIC8,将它装上 SOP 转 DIP 的转接器(208mil 1.27mm),并为它焊上 2.54mm header。你可以将 2.54mm 引脚插在面包板上,将芯片焊在适配 PCB 上,并将它安装在面包板的引脚上,从而对齐再焊接。这时 PCB 在引脚上,引脚在面包板上,将引脚往里推一点。
|
||
|
||
这是写给新 SOIC8 芯片的,但你也可以使用类似视频里的 socket,不过是给 WSON8 的。有时候它们又叫做 DFN8 或 QFN8 socket。你需要 1.27mm 间距的。
|
||
|
||
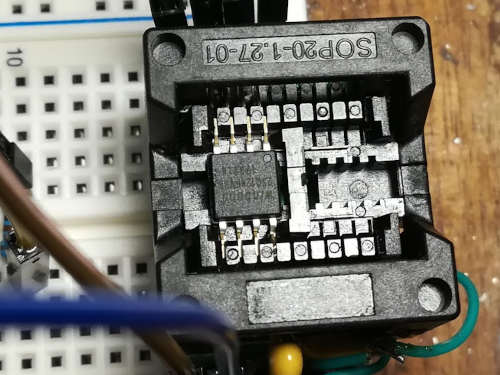
如果你是在对单独的 WSON8 进行刷入/读出,那你需要一个 WSON8/QFN8/DFN8 芯片座(1.27mm 间距)并将其安装到面包板来刷写。如果你主板上 flash IC 的着陆焊盘能上 SOIC8,那我们建议你转而使用 SOIC8,因为后续你想再刷写它时,可以使用测试夹,但你的主板已有的 WSON8 换成 SOIC8 可能更加可取;那种情况下,你可能仍要把原 WSON8 的内容读出来。
|
||
|
||
这展示的是芯片座上的 SOIC8 安装在面包板上,以供刷写:\
|
||
|
||
|
||
这张照片是 DIP8 IC:\
|
||

|
||
|
||
这张照片是 SOIC8 在 1.27mm 208mil SOP 转 DIP 的转接器上:\
|
||
|
||
|
||
注意:DIP8、芯片座上的 WSON8 以及芯片座上的 SOIC16,基本上是一样的,只是用了相应的转接器。
|
||
|
||
如果你要替换 DIP8,但是在使用接在转接器上的 SOIC8,则先将它焊接在转接器上,然后将 2.54mm 排针(方形引脚)插入面包板来把它们对齐。将 SOIC8 置于 PCB 上,插入引脚,并把引脚往里推一些,然后将其焊接。或者对面包板而言,你可以直接在 2.54mm 引脚上插入 DIP8 芯片座,并在它上面装上 SOIC8 + 转接器,然后将其焊接。使用优质的松香助焊剂(非酸性)和良好的 60/40 或 63/37 含铅焊锡(不要使用无铅焊锡):
|
||
|
||
|
||
|
||

|
||
|
||
SOIC8/SOIC16 焊接在主板上
|
||
------------------------------------
|
||
|
||
这是*系统内编程*或 *ISP* 的一个简短例子。
|
||
|
||
SOIC8:\
|
||
Pomona 5250 是一个 SOIC8 测试夹。也有其他的可以用,但这个是最好用的。使用 SOIC8 接线图(见上)来连接你的树莓派。你的主板很可能已经将 WP/HOLD(第 3 和第 7 引脚)拉到高电平了,所以不用连接这些。SOIC8 第 8 引脚的 VCC 很可能在主板上已经有去耦电容了,所以只需要勾起来而不用使用电容。
|
||
|
||
SOIC16:\
|
||
Pomona 5252 是一个 SOIC16 测试夹。也有其他的可以用,但这个是最好用的。就用这个。使用 SOIC16 接线图(见上)来连接你的树莓派。WP/HOLD 引脚是第 1 和第 9 引脚,并且很可能已经是高电平了,所以不需要上拉电阻。同样,第 2 引脚(VCC)也不再需要去耦电容,因为主板已经有一个了。
|
||
|
||
测试夹连接到 SOIC16 的例子如下:\
|
||
|
||
|
||
SOIC8 例子的照片如下:\
|
||
|
||
|
||
DIP8 焊接在主板上
|
||
------------------------------
|
||
|
||
把 DIP8 直接焊接在主板上怪异至极。它通常是安装在芯片座上的。
|
||
|
||
由于引脚足够大,你可以直接用测试夹的钩子来连接芯片进行刷写。你可能需要使用焊锡真空(提取)工具,对芯片进行拆焊,然后你就可以在那里安装一个芯片座了。接着你就可以把 DIP8 IC 插入芯片座。
|
||
|
||
我们在 canoeboot 项目从来没听过有哪块板子的 DIP8 是直接焊上去的。它基本都是安装在芯片座上的。
|
||
|
||
DIP8 IC 的引脚分配和 SOIC8 IC 一样。
|
||
|
||
使用 SOIC8 替换 WSON8 IC
|
||
---------------------------
|
||
|
||
**NOTE: You can alternatively purchase WSON8 probes from a site like Aliexpress.
|
||
They look similar to SOIC8 clips, and they work similarly.**
|
||
|
||
你*连是可以连* SOIC8 测试夹,但要连接效果好,需要费点功夫,而且这也十分不可靠。不要直接焊接 WSON8 的焊盘;有些人会这样做,但你不要这样做,因为你这样很容易就会损坏焊盘。
|
||
|
||
WSON8 的引脚分配和 SOIC8 一样,但它是球状 QFN(四边扁平无引脚封装)。它没有合适的夹子,有时候称为 QFN8。
|
||
|
||
目前 canoeboot 支持的所有硬件,有 WSON8 的主板也可以上 SOIC8,因为它的焊盘长到足够容纳这两者任意一种芯片。
|
||
|
||
在 T12 焊台上上使用 T12-D08 或者 T12-K 焊头,是不错的烙铁选择。KSGER 生产的焊台还不错:\
|
||
<https://yewtu.be/watch?v=w0nZCK7B-0U>
|
||
|
||
KSGER 焊台的外壳默认是没有接地的,所以你应该改装一下,让外壳接地,以防发生电气事故。这是为了你的安全。这个视频展示了操作方法:\
|
||
<https://yewtu.be/watch?v=-6IZ_sBgw8I>
|
||
|
||
使用优质的 60/40 或者 63/37 铅+锡焊锡,不要使用无铅的!无铅的不适合这类业余用途。使用优质的*松香*助焊剂。绝不要使用酸性助焊剂。Amtech 和 MG Chemicals 生产的助焊膏就很不错。把它放在分配器管中使用。其中一些助焊剂含有己二酸,其 pH 值较低,只是用作一种温和的活化剂。只要事后清洗助焊剂,应该就没问题。
|
||
|
||
确保手边有铜丝刷和湿海绵。在铜丝刷上擦拭烙铁,并在湿海绵上轻拍(从而去除氧化物),保持清洁。焊头要经常清洁。此外,清洁过后,要使用新焊锡重新镀锡焊头,以防焊头氧化!
|
||
|
||
确保你买的是 99.9% 的异丙醇。不要购买弱一些的溶液,因为它们含水,也不要用其他的化学物质,因为其他大多数都有腐蚀性。焊接之前,先用异丙醇清洁要焊接的区域,然后用布吸收湿酒精。你还可以用它清除掉你使用过的任何助焊剂。
|
||
|
||
焊点要良好,助焊剂的使用十分重要,因为它移除了氧化物,并防止焊接过程中的进一步氧化,确保焊锡能够正常流动,否则焊锡会起球,无法获得良好的焊点。
|
||
|
||
如果你焊接技术不好,我们准备了一些不错的视频,链接在 [FAQ 页面](../../faq.md),你可以去看看。
|
||
|
||
WSON8 IC:\
|
||
|
||
|
||
使用几层 kapton 胶带包围芯片周围的一大块区域,然后再铺上铝箔。这样可以隔热,减少让其他焊点再流动的风险(这会把它们变成冷焊点,并且有风险把它们从主板上敲下来):\
|
||
\
|
||
注意,胶带+铝箔不要盖住芯片本身或焊盘。让它们接触高温是必要的。
|
||
|
||
使用拆焊台,温度设为 330-340C 左右。温度这么高的原因是,空气的导热效率不如铁高,所以必须要高一些的温度。你需要在 IC 上面涂上很多松香助焊剂。喷嘴不要离主板太近。喷嘴的直径应该略高于芯片长度。在高气流下均匀加热。
|
||
|
||
对芯片喷射热空气时,用镊子夹住芯片,但不要用力。不要用力把芯片撬开了。只要用镊里夹住芯片,轻轻地推它,直到感觉到芯片可以自由移动了。这时,焊锡已经完全融化,芯片可以轻松取出来了。
|
||
|
||
如果不出什么问题,那一分钟内,芯片就能取下来,就像这样:\
|
||

|
||
|
||
在焊盘上,包括导热垫上,加以新焊锡:\
|
||
|
||
|
||
现在,用浸在松香助焊剂中的吸锡带将其吸干:\
|
||
|
||
|
||
确保所有焊锡都已经清除:\
|
||
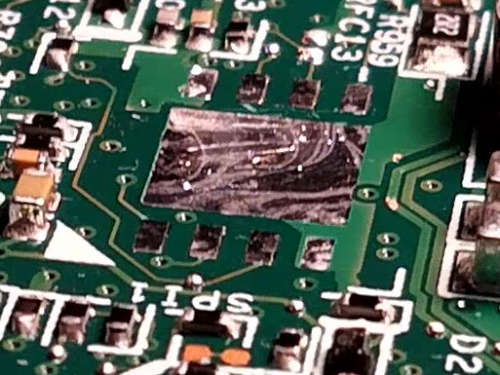\
|
||
你会发现,其中一个焊盘上的焊锡没有完全去除。这是有意为之的,目的是给你参考对比一下。其他焊盘已经没有焊锡了。
|
||
|
||
你*可以*直接将没刷写好的芯片焊接上去,然后使用测试夹来刷写它。或者,你也可以将 SOIC8 插入面包板上的芯片座,并先刷好再焊接。如果你想把 WSON8 的内容读出来,你可以将移除的 WSON8 放在面包版上的芯片座中,然后使用 SPI 刷写器来对其进行读出。
|
||
|
||
|
||
对齐新的 SOIC8,将其焊到角落的引脚上。然后对其完全焊接。使用大量的助焊剂!\
|
||
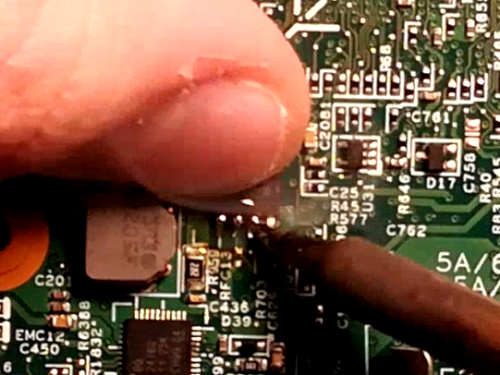\
|
||
这张图里用的是 T12-D08 焊头,但迷你凿形、迷你蹄形或刀形(如 T12-K)焊头是最理想的。
|
||
|
||
确保每一个焊点都完美了。好的焊点有光泽,并且焊锡流过的地方有凹陷的圆角。请看:\
|
||
|
||
|
||
弄完之后,用软毛刷和 99.9% 的异丙醇把剩余的助焊剂清理干净,然后趁酒精还是湿的,用布吸收酒精。99.9% 的异丙醇是最好用的液体,因为它挥发很快,并且不会残留腐蚀性物质。
|
||
|
||
-------------------------------------------------------------------------------
|
||
|
||
许可证
|
||
=========
|
||
|
||
本页面发布所使用的版权条款,不同于本网站上大多数其他页面。
|
||
|
||
本页面及其照片,以 [CC BY SA 4.0](https://creativecommons.org/licenses/by-sa/4.0/legalcode.txt) 发布。请检查 Git 仓库历史,了解本文档何部分归谁所有。
|
||
|
||
部分这些资源源自于*旧的* Canoeboot git 仓库,Canoeboot 随后分离成了单独的仓库,包括 `cbmk` 仓库。
|
||
|
||
展示了 BeagleBone Black 的照片,以 GNU Free Documentation License 许可,如同本网站的其他页面和图像。如果你想的话,你也可以在 CC-BY-SA 4.0 下使用它们(我,Leah Rowe,拥有本页展示的全部 BBB 照片的所有权,除了 beaglebone 网站上的那一张以外;而那一张只是在这里链接的,而不是托管在 av.canoeboot.org 服务器的)。
|
||
|
||
本页面的该版本托管在 `lbwww` git 仓库,其图像托管在 `lbwww-img` 仓库(来自用户 canoeboot)。
|